

Սկզբունքըպտուտակային քայլային շարժիչամրացման համար օգտագործվում են պտուտակ և гайկա, իսկ ամրացված гайկա օգտագործվում է՝ պտուտակի և гайկայի միմյանց նկատմամբ պտտվելը կանխելու համար, այդպիսով թույլ տալով պտուտակին շարժվել առանցքային ուղղությամբ։ Ընդհանուր առմամբ, այս փոխակերպումն իրականացնելու երկու եղանակ կա։
Առաջինը շարժիչի մեջ ներքին թելերով ռոտոր կառուցելն է և իրականացնելըգծային շարժումռոտորի ներքին թելերը և պտուտակը միացնելով, որը կոչվում է թափանցող պտուտակային քայլային շարժիչ։ (Գնդիկը ինտեգրված է շարժիչի ռոտորի հետ, և պտուտակային լիսեռը անցնում է շարժիչի ռոտորի կենտրոնով։ Օգտագործման ժամանակ ամրացրեք պտուտակը և կատարեք հակապտույտ, երբ շարժիչը միացված է և ռոտորը պտտվում է, շարժիչը գծային շարժում կկատարի պտուտակի երկայնքով։ (Ընդհակառակը, եթե շարժիչը ամրացված է, մինչդեռ պտուտակը հակապտույտ է, ապա պտուտակը կկատարի գծային շարժում)։
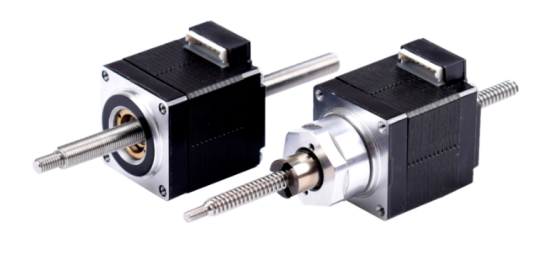
Առանցքի տեսակը
Երկրորդը՝ վերցնելն էպտուտակՔանի որ շարժիչի լիսեռը դուրս է գալիս, շարժիչի արտաքին մասում՝ արտաքին շարժիչի պտուտակի միջոցով և պտուտակային միացման միջոցով, որպեսզի իրականացվի գծային շարժում, սա արտաքին շարժիչի տիպի պտուտակային քայլային շարժիչ է: Արդյունքը մեծապես պարզեցված դիզայն է, որը թույլ է տալիս ճշգրիտ գծային շարժում կատարել շատ կիրառություններում՝ ուղղակիորեն պտուտակային քայլային շարժիչի միջոցով՝ առանց արտաքին մեխանիկական միացման տեղադրման: (Պատկերը գտնվում է շարժիչից դուրս և միացված է շարժիչի մեխանիզմին: Երբ շարժիչը պտտվում է, պտուտակը գծային շարժվում է պտուտակի երկայնքով):
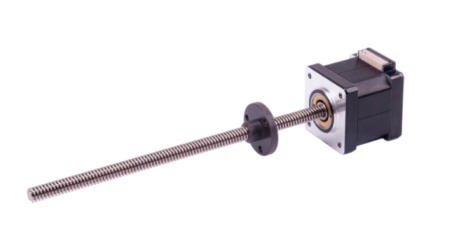
Արտաքին սկավառակի տեսակը
Առանցքային գծային քայլային շարժիչի կիրառման առավելությունները:
Կիրառման սցենարների համեմատություն, որտեղ արտաքին շարժիչով գծային քայլային շարժիչները օգտագործվում ենգծային ուղեցույցներ, միջառանցքային գծային քայլային շարժիչներն ունեն իրենց յուրահատուկ առավելությունները, որոնք հիմնականում արտացոլվում են հետևյալ 3 ասպեկտներում՝
1.Թույլ է տալիս ավելի մեծ համակարգի տեղադրման սխալ.
Ընդհանուր առմամբ, եթե օգտագործվում է արտաքին շարժիչով գծային քայլային շարժիչ, պտուտակային և ուղեցույցային ամրացման միջև վատ զուգահեռականությունը, հավանաբար, կհանգեցնի համակարգի կանգառի: Այնուամենայնիվ, առանցքային միջով անցնող գծային քայլային շարժիչների դեպքում այս ճակատագրական խնդիրը կարող է զգալիորեն մեղմվել դիզայնի կառուցվածքային առանձնահատկությունների շնորհիվ, որոնք թույլ են տալիս ավելի մեծ համակարգային սխալ:
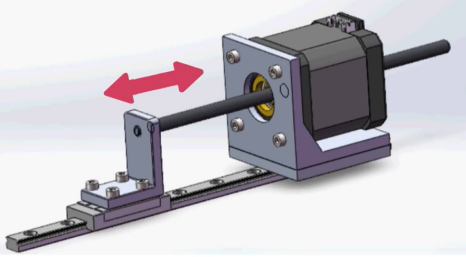
Երբ շարժիչը լիցքավորված է, ընկույզը պտտվում է ռոտորի հետ, իսկ պտուտակը միացված է արտաքին բեռին և շարժվում է ուղիղ գծով ուղեցույցի երկայնքով։
2.Չի սահմանափակվում պտուտակի կրիտիկական արագությամբ.
Երբ արտաքին շարժիչով գծային քայլային շարժիչները ընտրվում են բարձր արագությամբ գծային շարժման համար, դրանք սովորաբար սահմանափակվում են պտուտակի կրիտիկական արագությամբ: Սակայն, միջառանցքային գծային քայլային շարժիչի դեպքում պտուտակը ֆիքսված է և հակապտտվող, ինչը թույլ է տալիս շարժիչին շարժել գծային ուղեցույցի սահիկը: Քանի որ պտուտակը անշարժ է, բարձր արագություն իրականացնելիս այն չի սահմանափակվում պտուտակի կրիտիկական արագությամբ:
3.Սա խնայում է տեղադրման տարածքը՝
Գծային քայլային շարժիչը պտուտակի երկարությունից դուրս լրացուցիչ տարածք չի զբաղեցնում կառուցվածքային դիզայնի շնորհիվ, որտեղ պտուտակը ներկառուցված է շարժիչի մեջ: Նույն պտուտակի վրա կարող են տեղադրվել մի քանի շարժիչներ: Շարժիչները չեն կարող «անցնել» միմյանց միջով, բայց դրանց շարժումները միմյանցից անկախ են: Հետևաբար, այն հարմար ընտրություն է ավելի խիստ տարածքային պահանջներ ունեցող կիրառությունների համար:
Ավելի շատ տեղեկությունների համար խնդրում ենք կապվել մեզ հետ հետևյալ հասցեով՝amanda@kgg-robot.comկամ+WA0086 15221578410.
Հրապարակման ժամանակը. Փետրվարի 11-2025




